Edge-Based Monocular Thermal-Inertial Odometry
A RA-L paper on real-time monocular thermal-inertial odometry that uses thermal edge structures, adaptive DT-KLT tracking, and sliding-window optimization for localization under darkness, smoke, and weak visible texture.
Overview
A RA-L paper on real-time monocular thermal-inertial odometry that uses thermal edge structures, adaptive DT-KLT tracking, and sliding-window optimization for localization under darkness, smoke, and weak visible texture.
Details
Why Edges Instead of Raw Thermal Intensity
Thermal cameras are attractive for all-day localization because they are less dependent on visible illumination. The hard part is data association: thermal images often have low contrast, high noise, and abrupt appearance changes caused by non-uniformity correction or changing heat radiation. Standard visual feature pipelines can fail because the image does not provide stable RGB-like texture.
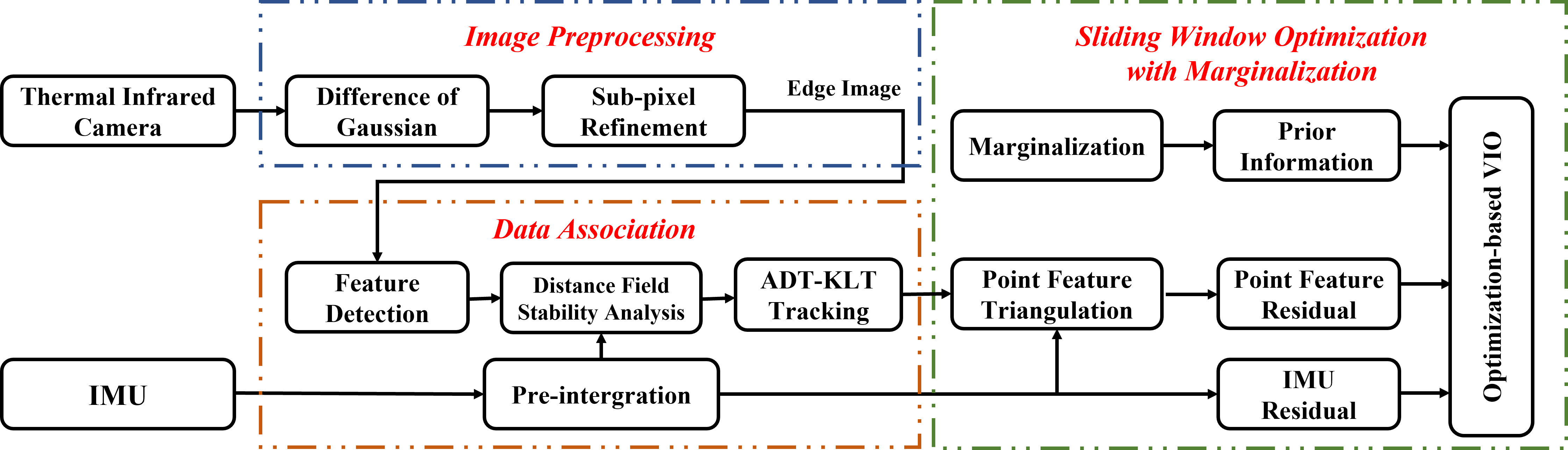
ETIO uses a different observation: thermal radiation changes most clearly at object boundaries. Instead of tracking raw thermal intensity patches, it converts thermal images into binarized edge images and builds odometry around the edge structure. This makes the front end less sensitive to weak texture and illumination changes while preserving geometric cues useful for motion estimation.
Distance-Transform KLT for Sparse Edge Images
Directly applying standard KLT to edge images is unreliable because binary edge patches are sparse and can create local optima. ETIO introduces distance-transform-aided KLT: the edge image is converted into a dense distance field, where each pixel stores its distance to the nearest edge. Tracking then minimizes the distance-field difference between corresponding patches rather than raw intensity difference.
The front end also refines edge locations at sub-pixel accuracy using a DoG-based edge detector. The goal is not to make thermal images visually prettier, but to extract repeatable geometric boundaries that can survive poor thermal image quality.
Adaptive Tracking for Changing Thermal Appearance
Distance-transform tracking is effective when edge structure is stable, but thermal scenes can change abruptly as the camera rotates or the radiation pattern changes. ETIO therefore uses an adaptive DT-KLT strategy. A distance-field stability score combines changes in the number of extracted edge points with the relative rotation predicted by IMU preintegration.
When the distance field is stable, ETIO uses DT-KLT on edge images. When the field changes too aggressively, it switches back to standard KLT to avoid tracking failure. This adaptive policy is the core front-end mechanism that makes the estimator more robust than a single fixed tracking rule.
Sliding-Window Thermal-Inertial Estimation
The back end combines IMU preintegration with reprojection errors from tracked thermal edge observations in a sliding-window optimization. This tightly coupled formulation lets the system maintain a real-time state estimate even when image associations are interrupted or temporarily weak.
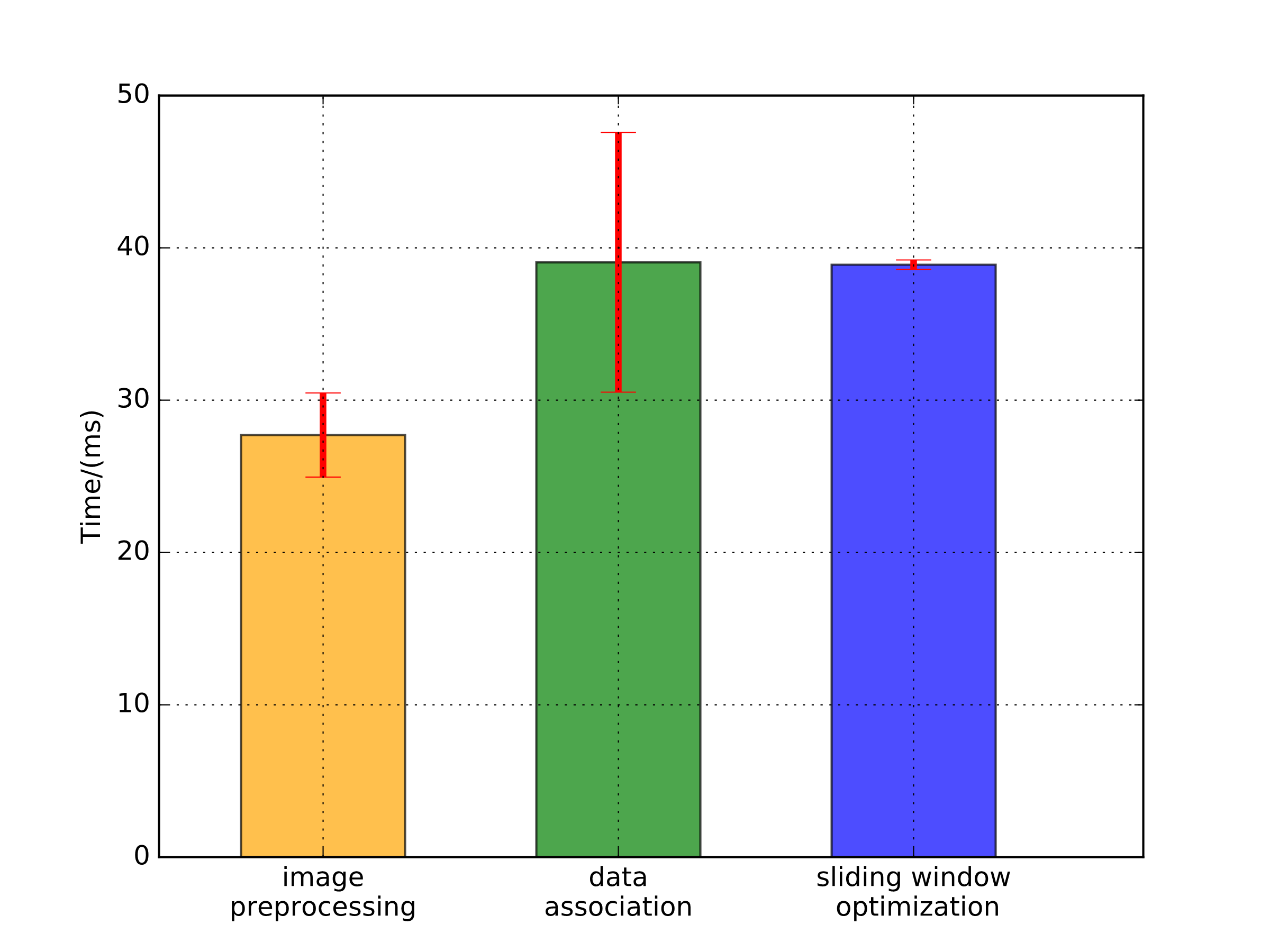
The reported implementation runs without GPU acceleration on an Intel NUC with an i7-10710U processor. The paper reports a maximum odometry output frequency of about 25 Hz, with image preprocessing, data association, and sliding-window optimization organized for real-time operation.
Public, Outdoor, and Smoke Experiments
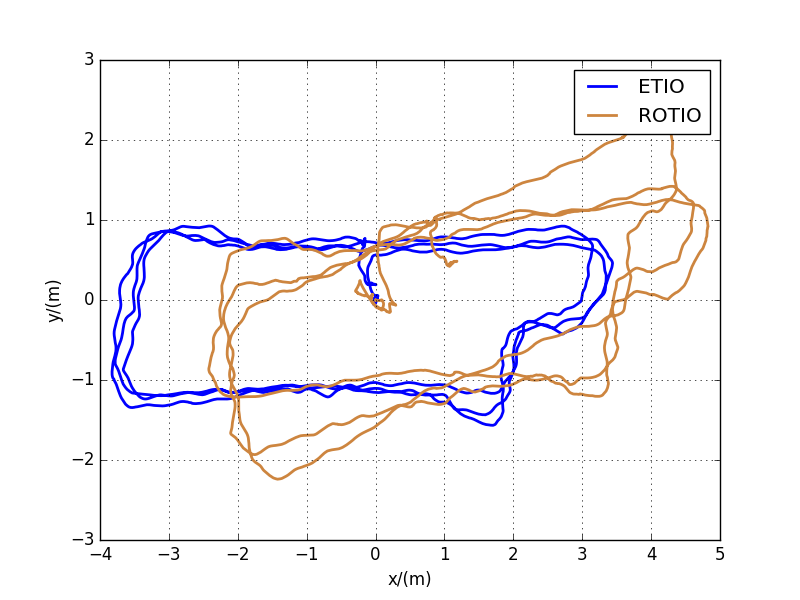
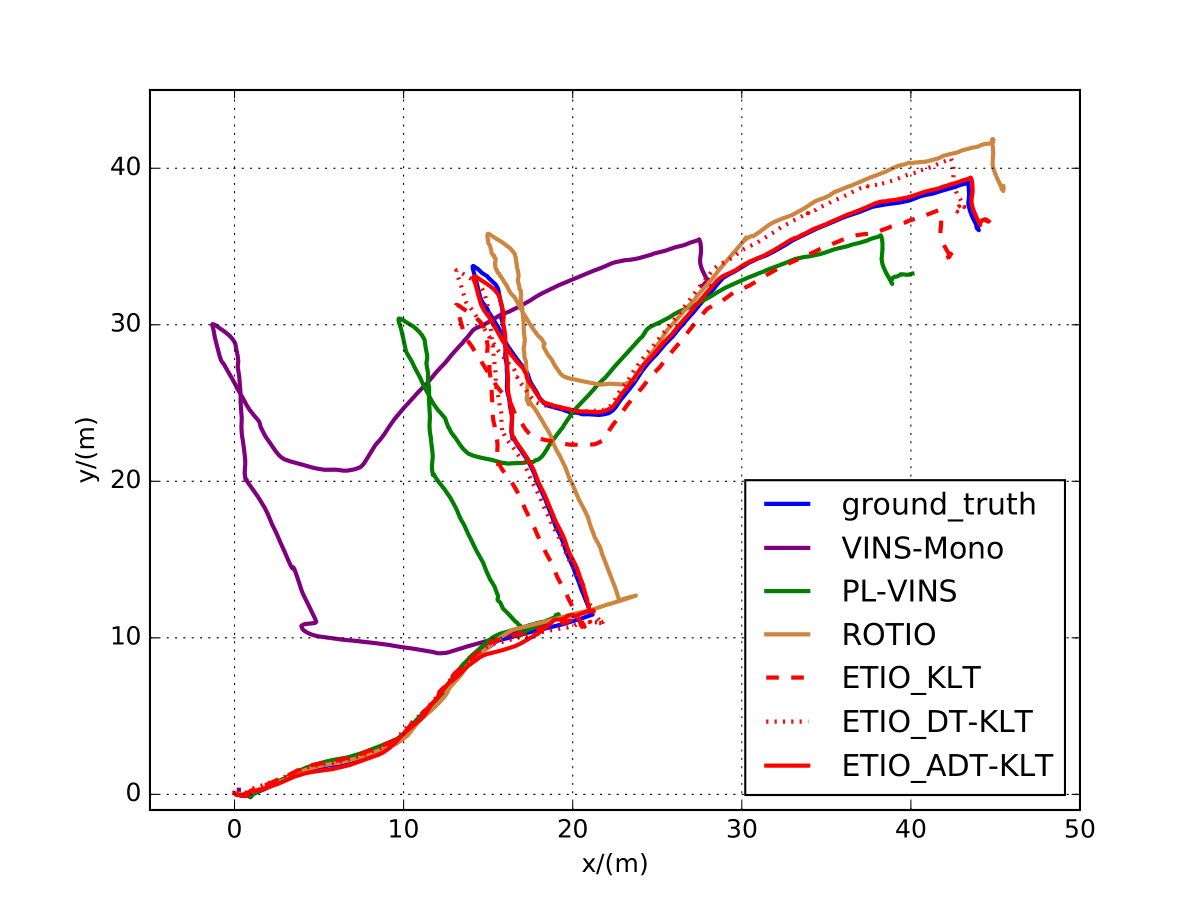
On the Urban Parking Lot and Active Gold Mine public datasets, ETIO achieved the lowest reported RMSE ATE among the compared methods in the paper: 0.648 m and 0.409 m, respectively. The ablation also shows the progression from standard KLT to DT-KLT and then to the adaptive ADT-KLT tracker.
The real-world outdoor experiments cover day, dusk, and night sequences of approximately 200 m each. ETIO reports the best RMSE ATE across all four outdoor sequences, including daytime thermal scenes affected by solar radiation.
In the extreme dark smoke-filled room experiment, visible-light methods failed, while ETIO kept the accumulated drift low: 0.211 m over 73.2 m and 0.080 m over 54.3 m. These results make ETIO an important precursor to later thermal-LiDAR-inertial work such as DaLiTI.