Robust Stereo Thermal-Radar-Inertial SLAM for Fireground Environments
Real-time stereo thermal-radar-inertial localization for fireground-style environments, validated across smoke, water mist, fire, warehouse, indoor-outdoor, and semi-outdoor trials, with normalized APE below 1% of trajectory length on ground-truth sequences.
Overview
Real-time stereo thermal-radar-inertial localization for fireground-style environments, validated across smoke, water mist, fire, warehouse, indoor-outdoor, and semi-outdoor trials, with normalized APE below 1% of trajectory length on ground-truth sequences.
Details
Overview
Real-time localization is the first capability that has to remain stable when the robot enters smoke, water mist, fire, darkness, and weakly structured indoor space. This project builds a stereo thermal-radar-inertial SLAM backbone for fireground-style environments and validates it across indoor-outdoor, warehouse, smoke, water-mist, active-fire, and semi-outdoor trials. On ground-truth sequences, representative APE RMSE stays below 1% of trajectory length.
The project-level outcome is a pose backbone that remains usable when conventional RGB- or LiDAR-dominant odometry becomes fragile. It supports robot pose feedback, map alignment, and operator-facing situational awareness in the same sensing payload used by the broader fireground robotics system.
Why Fireground SLAM Is Different
Fireground autonomy first depends on reliable pose. Dense maps, operator interfaces, and higher-level navigation all become fragile if the robot cannot maintain localization while moving through smoke, water mist, fire, darkness, or visually textureless interiors. The same sensing background as the dense mapping project applies here, but the emphasis shifts from scene reconstruction to real-time state estimation.
The difficulty is that degradation is not constant. Smoke suppresses visible texture, water mist and suspended droplets scatter geometric measurements, fire changes thermal appearance, and semi-outdoor transitions can alternate between structured and weakly constrained motion. A robust system therefore has to exploit complementary sensing and adapt when one modality becomes less informative.
Robust Localization Backbone
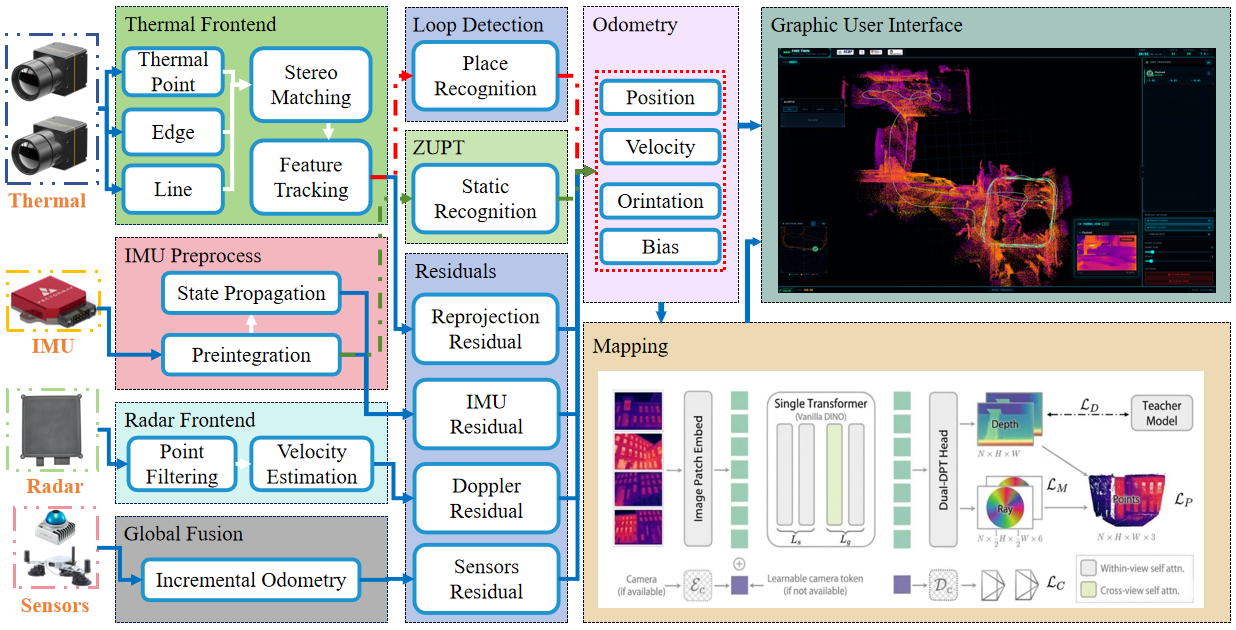
The system is built around thermal, 4D radar, and inertial sensing because the modalities fail differently. Thermal imagery keeps heat-based scene cues available when visible appearance degrades. Radar contributes geometric and motion-related evidence under smoke, dust, rain, and poor illumination. Inertial sensing keeps motion continuous through short intervals where external observations become unreliable.
At the capability level, the backbone combines modality-aware localization, degradation-aware behavior, loop-level consistency, and stationary-motion updates such as ZUPT. The goal is not to make every sensor trusted equally all the time, but to keep the pose estimate stable as the environment moves between textureless interiors, smoke, open space, and fireground clutter.
Validation Across Degraded Sites
The evaluation covers indoor-outdoor NTU sequences, indoor fireground mock-site trials, outdoor fireground-style trials, and warehouse tests. These settings include heavy rain, semi-outdoor fire, mist, smoke, water mist, dynamic pedestrians, stairs, outdoor-to-indoor transitions, and warehouse smoke.
The important result is not one isolated trajectory, but consistency across scene types:
- 0.20% normalized APE RMSE on an NTU indoor-lab trajectory.
- 0.11-0.17% normalized APE RMSE on outdoor fireground-style runs up to 628 m.
- 0.31-0.75% normalized APE RMSE on indoor fireground mock-site trials.
- 0.46-0.49% normalized APE RMSE on warehouse timing trials.
- A 164.8 m warehouse smoke run logged without ground-truth reference.
| Setting | Validation Result |
|---|---|
| NTU—IndoorLab | 57.9 m trajectory, 0.115 m APE RMSE (0.20% of trajectory length) |
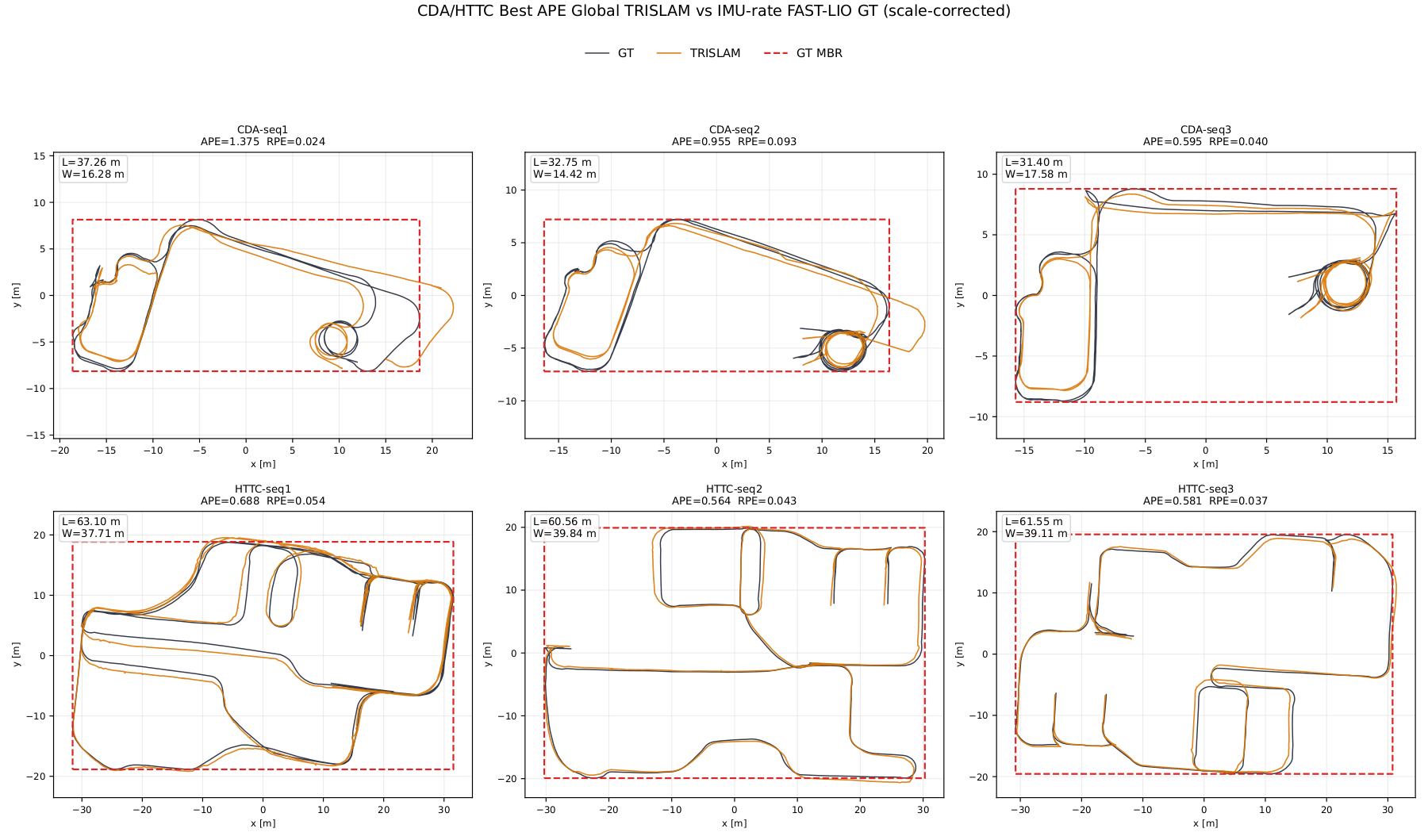
| Outdoor fireground-style trials | 336-628 m trajectories, 0.564-0.688 m APE RMSE (0.11-0.17% of trajectory length) |
| Indoor fireground mock-site trials | 182-190 m trajectories, 0.595-1.375 m APE RMSE (0.31-0.75% of trajectory length) |
| Warehouse time trials | 31.8-58.5 m trajectories, 0.147-0.284 m APE RMSE (0.46-0.49% of trajectory length) |
| Warehouse smoke trial | 164.8 m trajectory logged under smoke without ground-truth reference |
Fireground-Oriented Outcome
The project is positioned as the localization foundation for the broader fireground robotics payload. It supports stable robot pose feedback and operator-facing situational awareness in scenes where teleoperation alone is limiting and single-modality perception is too brittle.

The result is a real-time localization layer that remains useful before the scene becomes clean or visually convenient. That makes robust SLAM the practical bridge between the sensing payload and field-ready robot operation.