VR-Guided Remote Control for a Mobile Sensor Gimbal
A VR-guided pitch-yaw sensor gimbal for mobile robots, combining mechanical design, embedded real-time control, headset-based viewpoint interaction, and multi-sensor SLAM platform integration.
Overview
A VR-guided pitch-yaw sensor gimbal for mobile robots, combining mechanical design, embedded real-time control, headset-based viewpoint interaction, and multi-sensor SLAM platform integration.
Details
Teleoperation Context
Mobile robot teleoperation is often limited by viewpoint control. Keyboard or joystick commands can move the robot, but they do not give the operator a natural way to look around, inspect a target, or redirect the sensing payload while the platform is moving. This project built a VR-guided pitch-yaw sensor gimbal so that the robot viewpoint could follow the operator’s head motion more directly.
The system was developed at HITSZ nROS-Lab between October 2022 and September 2023. My work covered the mechanical model, embedded control, human-computer interaction framework, VR application, and integration with a mobile multi-sensor SLAM platform.
Mobile Sensor Gimbal Platform
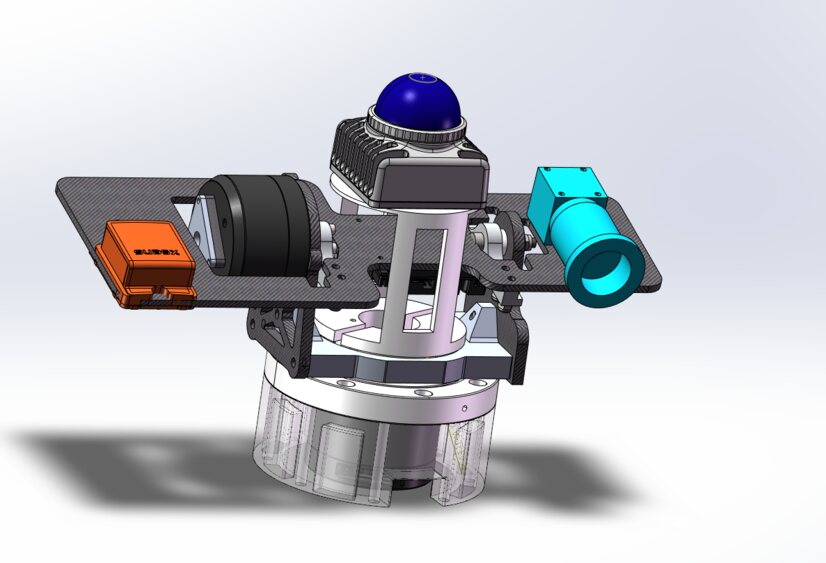
The gimbal was designed as a two-axis module for mobile robots. The mechanical layout provides pitch-yaw actuation while keeping the sensor payload compact enough for robot mounting. The design had to balance field of view, payload clearance, mechanical stiffness, and the need to keep the rotating module practical for mobile deployment.
On the control side, the system required real-time embedded actuation rather than offline visualization. The controller drives the gimbal axes from operator viewpoint commands and keeps the sensing direction synchronized with the intended teleoperation input.
VR Interaction and SLAM Platform Use
The interaction layer maps VR headset motion to the mobile gimbal viewpoint. This gives the operator a more direct way to inspect the environment and steer the sensing direction, especially when the robot itself is operating remotely or when the payload needs to observe a target without turning the entire base.
The gimbal was also used as part of a multi-sensor SLAM platform. In that setting, the controllable viewpoint is not only an operator interface, but also a practical tool for data acquisition, sensor placement, and mobile robot inspection experiments.
Engineering Outcome
The project connected mechanical design, embedded control, human-computer interaction, and robotics deployment into a single working system. For my later work, it became an early example of a recurring theme: a robotics system is only useful when sensing, actuation, timing, operator interaction, and platform constraints are handled together.